The Dummy Head Tracking (DHT) software (free and open-source) can be used to compute 3D component trajectories of a rigid body from locally-mounted inertial sensors. These inertial sensors include linear accelerometers, angular rate sensors, and angular accelerometers. Even though the software was developed mainly for applications in vehicular crash tests with anthropomorphic test devices (ATD) and the focus was put on the THOR ATD's head (default selection as Body 1 on Screen 1; Figure 1), the DHT package allows for an arbitrary rigid body to be defined as Body 1. As an option, the software enables calculation of 3D component trajectories of an arbitrary Body 2 (e.g. vehicle, ATD's pelvis, etc.) in the inertial (global) reference system (IRF). When Body 2 is selected, the software computes also the motion of Body 1 in the Body 2's local frame.
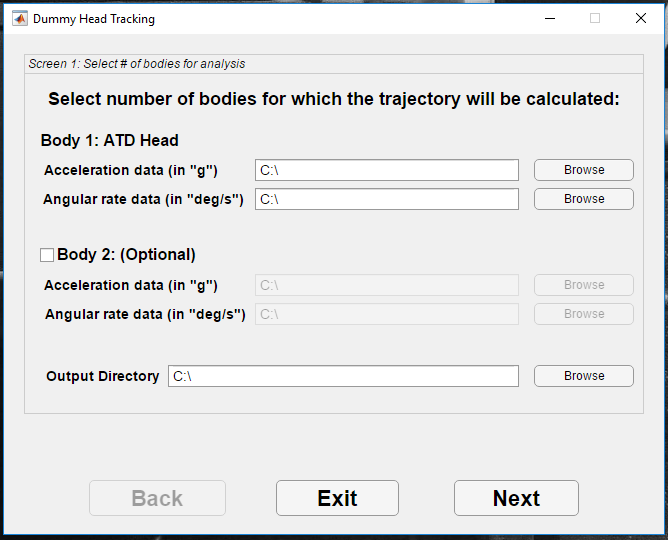
Figure 1. DHT software Screen 1: Select # of bodies for analysis.
Funding for this work was provided by the National Highway Safety Administration (NHTSA) under contract #DTNH2215D00004/0001.
The graphical user interface (GUI) was developed in MATLAB 2017a (MathWorks, Natick, MA, USA).
Installation
A link to download the installation files can be found at the bottom of this post. To install the DHT package use the DHT_v321_install.exe executable and follow the instructions on the screen.
Remark: The software was written using MATLAB 2017a (MathWorks, Natick, MA, USA) and it requires MATLAB shared libraries (but not the MATLAB license) to run. The required libraries (aka MATLAB Runtime) will be downloaded automatically during the installation process from the MathWorks website (for more information see: https://www.mathworks.com/products/compiler/matlab-runtime.html).
Software Output
The DHT package calculates and reports the following outputs:
- time histories of position for Body 1 and Body 2 (if selected) in the inertial reference frame (IRF),
- time-history of position for Body 1 in Body 2's local coordinate system (if Body 2 was selected),
- min and max values and time of their occurrence for both analyzed bodies for acceleration (both, linear and angular),
- velocity, and position, time histories of the local angular acceleration for Body 1 and Body 2 (if selected),
- time histories of the local and global linear acceleration for Body 1 and Body 2 (if selected),
- input data gathered in one file, including debias information. A separate file is created for each of the two bodies (if Body 2 is selected),
- time histories of the local-to-global transformation matrix for Body 1 and Body 2 (if selected),
- time histories of velocity for Body 1 and Body 2 (if selected) in the global (inertial) coordinate system.
In addition, up to three graphs are created and saved (example shown in Figure 2). The graphs depict the time-history of the global trajectory components for Body 1 and Body 2, and Body 1 relative to Body 2 motion, if Body 2 is selected on Screen 1.
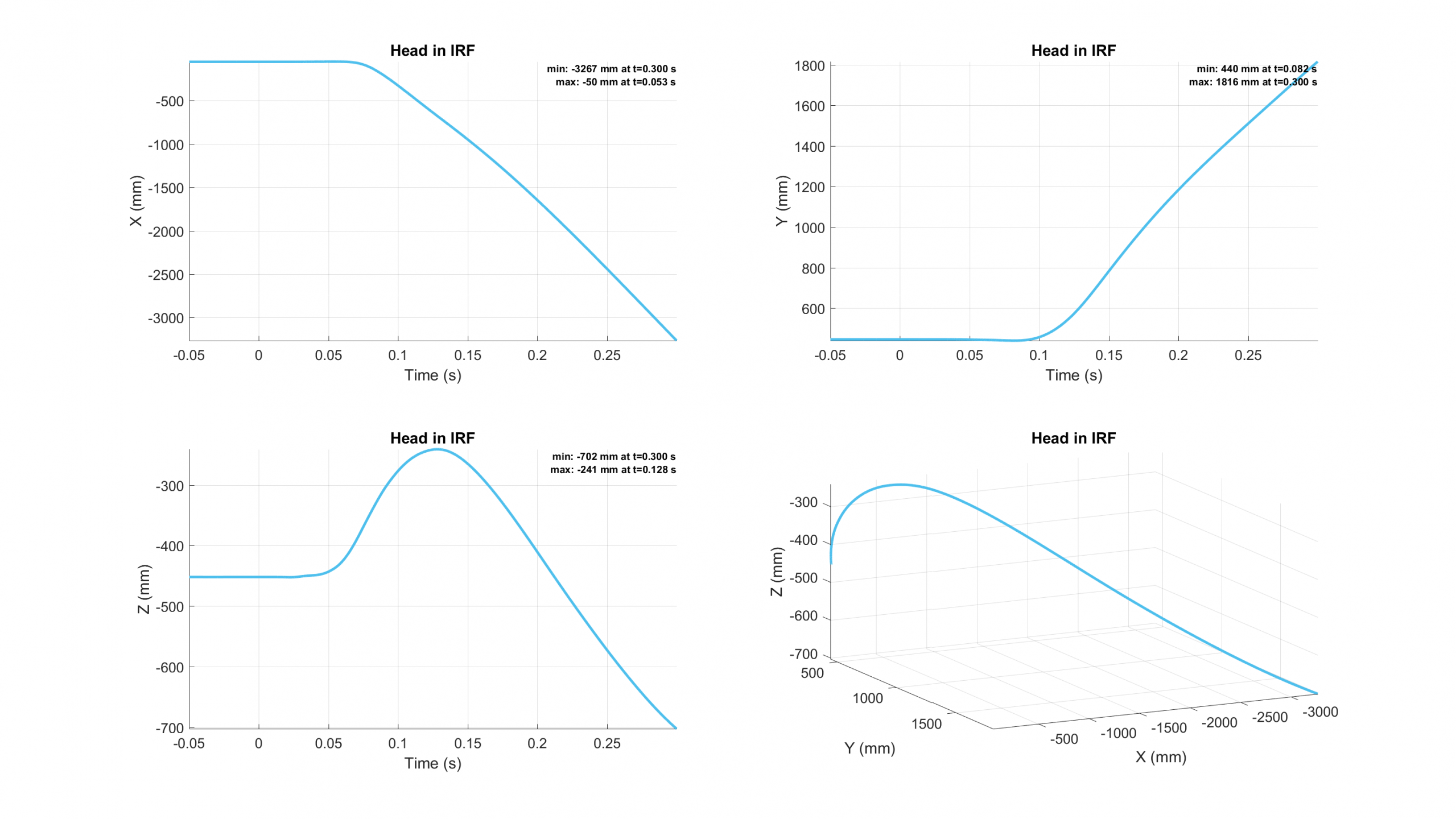
Figure 2. Calculated global trajectory components (example) for one of the analyzed bodies.
Other Available Files
Before using the software, it is strongly advised to become familiar with the software manual (DHT_v321_software_guidelines.pdf). The manual describes the format of the input files, defines the steps required to obtain the initial orientation of the tracked body, gives the definition of the point on the rigid body that is being tracked, and briefly discusses different methods of obtaining local angular acceleration. In addition, good practices and tips are presented in the manual to help the user to minimize errors in the calculated trajectory.
The Dummy Head Tracking (DHT) software is free and open-source. All of the source files (front and back-end code; DHT_v321_source_files.zip) are available to download and use through the MATLAB software.