UVA’s Moon Robot Collects Awards in NASA’s Lunabotics Challenge

UVA MARS’ Robot “Artie” Competes at Lunabotics 2025
UVA’s robot “Artie” — named for NASA’s Artemis mission — built the third largest berm in the space agency’s 2025 Lunabotics Challenge competition. (Video by Natasha Smith)
The Hoos dug in at the Lunabotics Challenge, NASA’s annual robotics design competition for college students, and came away with a top prize for innovation.
The University of Virginia School of Engineering and Applied Science’s team, known as the Mechatronics and Robotics Society, or MARS, earned four awards at the prestigious student competition held in May at Kennedy Space Center in Florida. UVA’s entry, a robot nicknamed Artie, was one of five bucket drum designs among 35 team builds in a qualifying event at the University of Central Florida and was one of 10 teams that made the finals.
“My goal for MARS has been for us to be one of the top Lunabotics teams,” said then MARS president Craig Kalkwarf, who will graduate in 2026 after a year away from UVA to complete the NASA Pathways internship. “I think we are there now.”
It took everyone to execute a great plan.
The object of the Lunabotics Challenge is to build a prototype robot that could support NASA’s Artemis campaign to return humans to the moon.
The MARS team’s choice of a NASA-inspired bucket drum design for their robot, which is meant to operate on the moon’s surface, landed them the innovation award — which came with a small flag from the unmanned Artemis I mission that orbited the moon in 2022.
In Robotics, Less Can Be More
The moon is covered with loose, rocky soil called regolith. In the competition, robots had to collect and transport simulated regolith, then deposit it to construct a raised berm — a structure that could, for example, protect against flying material during lunar landings and launches.

The MARS team’s approach impressed the judges. Artie is lightweight, has minimal moving parts and its single large drum — compared to NASA’s current four-drum design — transports more regolith in less time than their earlier designs.
“We made the change to reduce complexity,” said Nayeon Son, a rising fourth-year student who co-led the MARS mechanical team with 2025 graduate Cayla Celis.
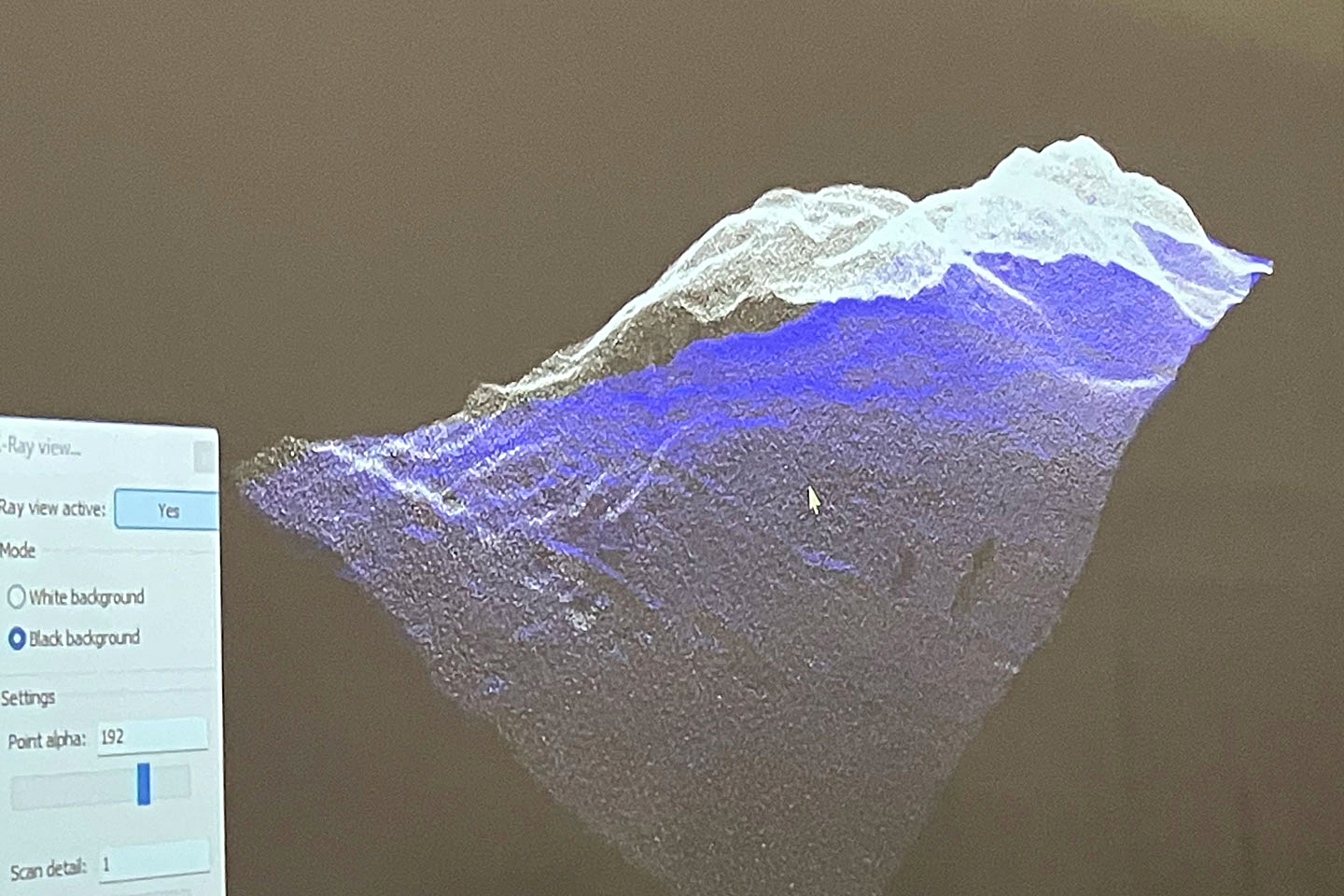
Artie employs a slotted drum that spins forward to scoop up the soil, then turns slowly backward to deposit it neatly in place. The drum moves up and down on tracks to raise it during transit and dumping.
MARS had previously competed with a more complex bucket ladder system that was prone to breakdowns. Artie’s simplicity delivered the reliability needed for almost two hours of competing, Kalkwarf said.
“In past competitions, traversing back and forth from the dig site to the berm took too much time, so we aimed to limit that,” Son added.
Natasha Smith, the MARS team’s adviser since 2019, said their whole 2025 operation was a leap ahead of previous years.

“It was a risk to go with the bucket drum,” said Smith, a professor of mechanical engineering and former director of the mechanical engineering undergraduate program. “Teams usually stick with what they know works.”
Celis credited that decision to the newest members of the MARS team.
“First-year students, led by Amith Polineni, pushed the bucket drum idea,” Celis said. “They had a fresh perspective on the competition, and following their unique ideas led to us winning the innovation award.”
While preparing for the competition, the 82-member club used its numbers advantage to split into design groups. The groups produced three distinct prototypes over the fall semester, including the new drum design they ultimately chose.
Subteams Bring the Plan Together
Smith has watched the students grow into their leadership roles.
“Craig soaked in all the feedback from the judges over the years and put together a great plan,” Smith said, “but it took everyone to execute the plan so well.”
Digging into that feedback to maximize points this year, Kalkwarf focused on scheduling work based on how long tasks took in previous years. He talked to leaders on UVA Engineering’s rocketry, solar car and aero design teams — these groups all use the machine and fabrication shops at the Lacy Student Experiential Center — to glean what works for them.
“A lot of this project management I learned from experience in MARS and Craig Nickol’s Aerospace Systems Development and Leadership class,” Kalkwarf said.
In addition to Celis and Son, Ben Cohen, who graduated in May, led a group of mechanical subteam members responsible for manufacturing the robot. Three more technical areas rounded out the subteams: electrical, systems and computer, respectively overseen by fourth-year student Austen Yun, May graduate Hao Gu, and rising third-year student Mikhail Kornilov and May graduate Surya Selvam. It was up to the subteam leaders to break down big jobs into smaller ones they could delegate.
More Awards
While MARS won the innovation award for originality, efficiency, effectiveness and problem-solving in Artie’s design, the NASA judges also awarded the team’s systems engineering paper second place, noting their implementation of the NASA Systems Engineering process.
With systems lead Gu on point, the team had rigorously applied systems engineering principles, Kalkwarf said, building in progress checks and quintupling time allotted for testing the rover.
First-year students had a fresh perspective, and their ideas led to us winning the innovation award.
UVA also won the NASA Solar System Exploration Research Virtual Institute Granular Mechanics Award from the Center for Lunar and Asteroid Surface Science.
The research award was for an investigation by Kalkwarf, Celis, Son and rising third-year student Eric Paschke on how to build a simulated lunar regolith surface that the team used to win funding from the Jefferson Trust for a new practice arena. They’ll soon be testing the robot on the same kind of material on which they compete, instead of on the sand volleyball court that they’ve had to use to date.
MARS also won second place in Student Engagement for documented STEM outreach to local elementary, middle and high school students, an effort led by rising third-year student Jordan Ho and Michael Chesterman, who will graduate in December.
Kalkwarf pointed to the awards as evidence that UVA earned its place among top Lunabotics competitors.
“We won awards spanning the whole competition. That is only possible because of the amazing team we have, who all worked their hardest to make MARS the best it can be.”

MARS Team Roster for the 2025 Lunabotics Challenge
The MARS team members who attended the competition in Florida are listed below by their undergraduate school years as they enter fall 2025 and their majors.
Craig Kalkwarf, fourth year, aerospace engineering and astronomy
Ben Cohen, graduated May 2025, aerospace engineering and astrophysics
Cayla Celis, graduated May 2025, mechanical engineering
Nayeon Son, fourth year, mechanical engineering
Austen Yun, fourth year computer engineering and statistics
Carlos Giron, fourth year, biomedical engineering
Hao Gu, graduated May 2025, computer science
Jordan Ho, third year, electrical engineering
Mikhail Kornilov, third year, computer science and math
Eric Paschke, third year, computer science
Zach Parsia, third year, mechanical engineering
Amith Polineni, second year, mechanical engineering
Christopher Lim, second year, mechanical engineering
Dante Huaman, second year, mechanical engineering
Jessica Su, second year, computer engineering
Diana Lin, second year, computer engineering
Eric Zeng, second year, computer science

The arena crew members, Amith Polineni (from left), Zachary Parsia and Nayeon Son, pause for a photo with the rest of the team behind the glass. They were all thumbs up and smiles at the end of their first run in which Artie built up a 46,000-cubic centimeter berm.

Testing on sand — a different weight and texture than regolith — makes predicting the robot’s performance in competition difficult. MARS now has funding to build a test facility with a simulated regolith surface like NASA’s Lunabotics arena. (Matt Cosner)
MARS members Surya Selvam (from left), Christopher Lim, and Eric Zeng start up the robot’s control software before a test on the sand volleyball court. (Matt Cosner)

Austen Yun (from left), Jordan Ho, Eric Zeng and Craig Kalkwarf diagnose an issue with Artie’s control system during a practice session. (Matt Cosner)

Christopher Lim (left) and Amith Polineni display the Innovation Award certificate, which includes a small flag flown in space on Artemis 1. (Zachary Parsia)
Communication check: Mikhail Kornilov checks robot controls as Jessica Su sets up equipment while their teammates stand by. (Natasha Smith)

Dante Huaman waits as Christopher Lim signs Amith Polineni’s protective suit. Everyone signed the crew's suits, worn as a precaution because regolith’s fine particles can be a mild respiratory irritant. (Jordan Ho)

The clear polycarbonate sidewalls of Artie’s drum allowed the team to see the regolith accumulate inside — a feature the competition’s judges appreciated. (Contributed photo)

Dante Huaman makes some adjustments on the robot. (Jordan Ho)

Mikhail Kornilov (left) and Eric Paschke set up the robot communication network before the team’s practice run. (Nayeon Son)
Ben Cohen (right) shows his workmanship to a fellow competitor. The robot was 100% designed and manufactured by students, using equipment at the Lacy Student Experiential Center. (Jordan Ho)
The team shows off all of its awards in front of the NASA “meatball.” Front row: Dante Huaman, Nayeon Son, Cayla Celis, Jessica Su, Diana Lin, Zachary Parsia; middle row: Carlos Giron, Eric Zeng, Christopher Lim, Craig Kalkwarf, Hao Gu, Jordan Ho, Ben Cohen; back row: Amith Polineni, Austen Yun, Mikhail Kornilov, Eric Paschke (Natasha Smith)